16 球状膨胀宇宙的哈勃定律
通过球状膨胀宇宙的球心一个平面与球体相交产生一个圆截面,在这个截面取出一个扇形部分,15 - 45式中,$v_\mathrm{r}$是关于$R_{0}$的单调递增函数,随着$R_{0}$的增大,对应点的膨胀速度变大.绘制速度空间向量图分布:

图55 扇形单元各点速度
Figure 55 Velocity of each point of the fan shape unit

图56 扇形单元各点速度减去中心速度
Figure 56 The velocity of each point of the fan shape unit minus the center velocity
在上面的右图中,所有点的速度向量减去扇形中心的速度向量,相当于加上扇形中心的速度向量的逆向向量.运用平行四边形法则对各点的两个速度向量进行加法运算,得到扇形区域各点相对于扇形中心的相对速度.

图57 以扇形中心为参考点,扇形单元各点相对速度
Figure 57 Use the fan shape centre as a reference point, the relative velocity of each point of the fan shape unit

图58 扇形单元相对速度几何分析
Figure 58 Geometric analysis of relative velocity of each point of the fan shape unit
下面开始对扇形中心周围的速度梯度进行分析.上面图形中,约定扇形区域中心点的速度为$v_{0}$,由15 - 45式可得$v_{0}$是一个关于$s$的函数,令
$$\begin{equation*}v_\mathrm{r} = \sqrt{2 k_\mathrm{c} R_{0}^{2} - \frac{2 k_\mathrm{c} R_{0}^{3}}{s + R_{0}}} = f [s] \tag{16 - 1}\end{equation*}$$
上式是一个标量,只给出上图任意一点速度的大小.在上图的平面中与OB1的夹角是$\theta$的半径的方向建立x轴,中心点为原点,y轴与x轴垂直,在图中的方向是斜向上.可以得到在上图的二维平面任意一点的速度矢量化后变成$v$.
$v= f[s] \cos [\theta ] \hat{x}+ f[s] \sin [\theta ]\hat{y}$ , $v_\mathrm{x}= f[s] \cos [\theta ] $ , $v_\mathrm{y}=f[s] \sin [\theta ]$
上式中x轴的单位向量是$\hat{x}$,y轴的单位向量是$\hat{y}$.令$\theta = 0$,对B1点应用上式变为
$$\begin{equation*}v_{0} = f [s] \hat{x} \tag{16 - 2}\end{equation*}$$
15 - 21式代入上式
$$\begin{equation*}v_{0} = f [r - R_{0}] \hat{x} \tag{16 - 3}\end{equation*}$$
令$$\begin{equation*}f [r - R_{0}] = g [r] \tag{16 - 4}\end{equation*}$$
联合15 - 21、15 - 23、16 - 3、16 - 4式,可得
$$\begin{equation*}v_{0} = g [r] \hat{x} = g [R_{0} + s] \hat{x} \tag{16 - 5}\end{equation*}$$
合并可得
$$\begin{equation*}v_{0} = f [s] \hat{x} = f [r - R_{0}] \hat{x} = g [r] \hat{x} = g [R_{0} + s] \hat{x} \tag{16 - 6}\end{equation*}$$
球体中心是O,扇形中心设为B1点.B1的半径大小是$r$.以某一个半径作为角度的参照线,OB1与参照线的夹角是$\theta$,OB1向上转过一个角度变化量$∆ \theta$,B1到达B2点.$\theta$、$∆ \theta$对应圆弧弧长分别是$S$、$∆ S$.B1点沿着OB1向右移动$∆ r$的距离,到达B3点.B2点的速度用$v_\mathrm{up}$表示,B3点的速度用$v_\mathrm{right}$表示.
$v_\mathrm{up}$和$v_{0}$是两个大小相同,方向不同的向量,在前面建立的坐标系下分解速度可得
$$\begin{equation*}v_\mathrm{up} = g [r] \cos [∆ \theta] \hat{x} + g [r] \sin [∆ \theta] \hat{y} \tag{16 - 7}\end{equation*}$$
对B3点应用16 - 6式可得
$$\begin{equation*}v_\mathrm{right} = g [r + ∆ r] \hat{x} \tag{16 - 8}\end{equation*}$$
假设B1点就是我们银河系、并假设可观测宇宙远远小于球状膨胀宇宙尺寸.我们观测到的宇宙边缘围成的可观测宇宙只是B1附近一个小小的球体.这个时候图中扇形会无限接近于一个长方形.上下直线边和两边圆弧变成长方形的四个边.求B1点附近的垂直方向和水平方向的速度梯度相当于求解在B1点,关于过B1点圆弧弧长方向的速度梯度和关于过B1点的半径方向的速度梯度.
速度关于时间的导数是加速度,速度关于空间一个维度的导数叫速度的梯度.
由弧长与圆弧角度的几何关系可得
$$\begin{equation*}∆ S = r {∆\theta} \tag{16 - 9}\end{equation*}$$
B1的半径方向速度的梯度
$$\begin{equation*}\frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} = \frac{v_\mathrm{right} - v_{0}}{∆ r} = \frac{g [r + ∆ r] \hat{x} - g [r] \hat{x}}{∆ r} = g^{'} [r] \hat{x} \tag{16 - 10}\end{equation*}$$
整理去除单位向量可得
$$\begin{equation*}\frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} = g^{'} [r] \tag{16 - 11}\end{equation*}$$
B1的弧长方向速度的梯度
$$\begin{equation*}\begin{aligned}\frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S]} & = \frac{v_\mathrm{up} - v_{0}}{∆ S} = \frac{g [r] \cos [∆ \theta] \hat{x} + g [r] \sin [∆ \theta] \hat{y} - g [r] \hat{x}}{r ∆ \theta} \\ & = \frac{1}{r} g [r] \frac{( \cos [∆ \theta] - 1 )}{∆ \theta} \hat{x} + \frac{1}{r} g [r] \frac{\sin [∆ \theta]}{∆ \theta} \hat{y} \end{aligned}\tag{16 - 12}\end{equation*}$$
上式等式右边是一个矢量,在笛卡尔坐标系中表达为x轴方向的分量和y轴方向的分量之和.应用勾股定理,求这个矢量的大小.同时更改$\frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S]}$的定义,上式中的含义是矢量,下面改成标量.
$$\begin{equation*}\begin{aligned}\frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S]} & = \sqrt{( \frac{1}{r} g [r] \frac{( \cos [∆ \theta] - 1 )}{∆ \theta} )^{2} + ( \frac{1}{r} g [r] \frac{\sin [∆ \theta]}{∆ \theta} )^{2}} \\ & = \frac{\sqrt{2 - 2 \cos [∆ \theta]} g [r]}{r ∆ \theta} \end{aligned}\tag{16 - 13}\end{equation*}$$
当B2点无限接近B1点时
$$\begin{equation*}\lim_{\Delta\theta\rightarrow0^{+}}\frac{\sqrt{2-2 \cos [\Delta\theta]}}{\Delta\theta}=1 \tag{16 - 14}\end{equation*}$$
联合16 - 13、16 - 14式可得
$$\begin{equation*}\frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S]} = \frac{g [r]}{r} \tag{16 - 15}\end{equation*}$$
垂直于前面分析的扇形所在平面,过球状膨胀宇宙的球心作一平面,同样可以获得一个圆形截面,运用与前面相似的分析,可以得到,任意过O点和B1点的截面与球体产生的圆弧方向速度的梯度都是一样的.
选取过O点和B1点的两个夹角为90°的平面,两个平面与球体相交产生两个圆,两个圆的圆弧过B1点的有两个切线.这两个切线与直线OB1构成三个互相垂直的直线,构建一个坐标系Ccs1.B1点附近,前面提到的第一个圆弧用$S_{1}$表示,第二个圆弧用$S_{2}$表示.
可得在Ccs1三维坐标系中
$$\begin{equation*}\frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} = g^{'} [r] , \frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S_{1}]} = \frac{g [r]}{r} , \frac{\mathrm{d}[v_\mathrm{z} ]}{\mathrm{d}[S_{2}]} = \frac{g [r]}{r} \tag{16 - 16}\end{equation*}$$
由16 - 6式可得
$$\begin{equation*}f [s] = g [r] \tag{16 - 17}\end{equation*}$$
由15 - 21式可得
$$\begin{equation*}r = R_{0} + s \tag{16 - 18}\end{equation*}$$
16 - 17、16 - 18式使用微积分链式法则,前面有类似的计算场景,这里不展示详细计算过程,直接给出结果
$$\begin{equation*}g^{'} [r] = f^{'} [s] \tag{16 - 19}\end{equation*}$$
$$\begin{equation*}\mathrm{d}[r] = \mathrm{d}[s] \tag{16 - 20}\end{equation*}$$
把16 - 17、16 - 18、16 - 19、16 - 20式代入16 - 16式,可得
$$\begin{equation*}\frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} = f^{'} [s] , \frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S_{1}]} = \frac{f [s]}{s + R_{0}} , \frac{\mathrm{d}[v_\mathrm{z} ]}{\mathrm{d}[S_{2}]} = \frac{f [s]}{s + R_{0}} \tag{16 - 21}\end{equation*}$$
用$A_\mathrm{up}$表示球面上圆弧方向速度的梯度,$A_\mathrm{right}$表示半径方向速度的梯度
$$\begin{equation*}A_\mathrm{up} = \frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S_{1}]} = \frac{\mathrm{d}[v_\mathrm{z} ]}{\mathrm{d}[S_{2}]} , A_\mathrm{right} = \frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} \tag{16 - 22}\end{equation*}$$
可得Ccs1三维坐标系三个两两垂直方向的速度的梯度
$$\begin{equation*}\left(A_\mathrm{right} , A_\mathrm{up} , A_\mathrm{up} \right) = \left( f^{'} [s] , \frac{f [s]}{s + R_{0}} , \frac{f [s]}{s + R_{0}} \right) \tag{16 - 23}\end{equation*}$$
由16 - 1式可得
$$\begin{equation*}f [s] = \sqrt{2 k_\mathrm{c} R_{0}^{2} - \frac{2 k_\mathrm{c} R_{0}^{3}}{s + R_{0}}} \tag{16 - 24}\end{equation*}$$
把16 - 24式代入16 - 23式
$$\begin{equation*}\left( A_\mathrm{right} , A_\mathrm{up} , A_\mathrm{up} \right) = \left( {\displaystyle\frac{k_\mathrm{c} R_{0}^{3}}{( s + R_{0} )^{2} \sqrt{2 k_\mathrm{c} R_{0}^{2} - {\displaystyle\frac{2 k_\mathrm{c} R_{0}^{3}}{s + R_{0}}}}}} , {\displaystyle\frac{\sqrt{2 k_\mathrm{c} R_{0}^{2} - {\displaystyle\frac{2 k_\mathrm{c} R_{0}^{3}}{s + R_{0}}}}}{s + R_{0}}} , {\displaystyle\frac{\sqrt{2 k_\mathrm{c} R_{0}^{2} - {\displaystyle\frac{2 k_\mathrm{c} R_{0}^{3}}{s + R_{0}}}}}{s + R_{0}}} \right) \tag{16 - 25}\end{equation*}$$
前面得到如下相关等式
$$\begin{equation*}\frac{4}{3} G k_\mathrm{r} π\rho = k_\mathrm{c} \tag{15 - 38}\end{equation*}$$
$$\begin{equation*}k_\mathrm{r} = - k_\mathrm{p} \tag{15 - 17}\end{equation*}$$
$$\begin{equation*}k_\mathrm{p} = \frac{ 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} }{1 + k_\mathrm{d}} \tag{15 - 14}\end{equation*}$$
把15 - 38、15 - 17、15 - 17式代入16 - 25式
$$\begin{equation*}A_\mathrm{up} = \frac{\sqrt{ - {\displaystyle\frac{ 8 Gπ\rho ( 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} ) R_{0}^{2}}{3 ( 1 + k_\mathrm{d} )}} + {\displaystyle\frac{8 Gπ\rho ( 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} ) R_{0}^{3}}{3 ( 1 + k_\mathrm{d} ) ( s + R_{0} )}}}}{s + R_{0}} \tag{16 - 26}\end{equation*}$$
$$\begin{equation*}A_\mathrm{right} = - \frac{ 4 Gπ\rho ( 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} ) R_{0}^{3}}{3 ( 1 + k_\mathrm{d} ) ( s + R_{0} )^{2} \sqrt{ - {\displaystyle\frac{ 8 Gπ\rho ( 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} ) R_{0}^{2}}{3 ( 1 + k_\mathrm{d} )}} + {\displaystyle\frac{8 Gπ\rho ( 1 + 2 k_\mathrm{d} - k_\mathrm{d}^{2} ) R_{0}^{3}}{3 ( 1 + k_\mathrm{d} ) ( s + R_{0} )}}}} \tag{16 - 27}\end{equation*}$$
设原来球状膨胀宇宙的半径是1,选取适当常数值代入16 - 26、16 - 27式.分三次代入,每次选取不同的$s$,并绘制函数图像
| $\begin{flalign}\{ A_\mathrm{up} , A_\mathrm{right} \} / . \{ G \rightarrow 1 , \rho \rightarrow 1 , k_\mathrm{d} \rightarrow 3 , s \rightarrow 0.1 \}\end{flalign}$ |
| $\begin{flalign}\{ \frac{\sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 0.1 + R_{0} )}}}}{0.1 + R_{0}} , \frac{2 \pi R_{0}^{3}}{3 ( 0.1 + R_{0} )^{2} \sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 0.1 + R_{0} )}}}} \}\end{flalign}$ |

图59 $s = 0.1$时$A_\mathrm{up} , A_\mathrm{right}$的函数图像
Figure 59 Graph of the function of $A_\mathrm{up} , A_\mathrm{right}$ when $s = 0.1$
| $\begin{flalign}\{ A_\mathrm{up} , A_\mathrm{right} \} / . \{ G \rightarrow 1 , \rho \rightarrow 1 , k_\mathrm{d} \rightarrow 3 , s \rightarrow 0.4 \}\end{flalign}$ |
| $\begin{flalign}\{ \frac{\sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 0.4 + R_{0} )}}}}{0.4 + R_{0}} , \frac{2 \pi R_{0}^{3}}{3 ( 0.4 + R_{0} )^{2} \sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 0.4 + R_{0} )}}}} \}\end{flalign}$ |
| $\begin{flalign}\{ A_\mathrm{up} , A_\mathrm{right} \} / . \{ G \rightarrow 1 , \rho \rightarrow 1 , k_\mathrm{d} \rightarrow 3 , s \rightarrow 1 \}\end{flalign}$ |
| $\begin{flalign}\{ \frac{\sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 1 + R_{0} )}}}}{1 + R_{0}} , \frac{2 \pi R_{0}^{3}}{3 ( 1 + R_{0} )^{2} \sqrt{{\displaystyle\frac{4 \pi R_{0}^{2}}{3}} - {\displaystyle\frac{4 \pi R_{0}^{3}}{3 ( 1 + R_{0} )}}}} \}\end{flalign}$ |

图60 $s = 0.4$时$A_\mathrm{up} , A_\mathrm{right}$的函数图像
Figure 60 Graph of the function of $A_\mathrm{up} , A_\mathrm{right}$ when $s = 0.4$

图61 $s = 1$时$A_\mathrm{up} , A_\mathrm{right}$的函数图像
Figure 61 Graph of the function of $A_\mathrm{up} , A_\mathrm{right}$ when $s = 1$
观察图像,得出结论:在球状膨胀宇宙各点的切向速度的梯度和径向速度的梯度一般是不相等的.随着球状膨胀宇宙球面各点相对位移的增大,也就是在球状膨胀宇宙不同的膨胀时期,球体内部同一动点的切向速度的梯度和径向速度的梯度二者的大小关系也会变化.在切向速度的梯度和径向速度的梯度的基础上,下面分析球状膨胀宇宙内部任意动点的三维空间宇宙动点速度的梯度.
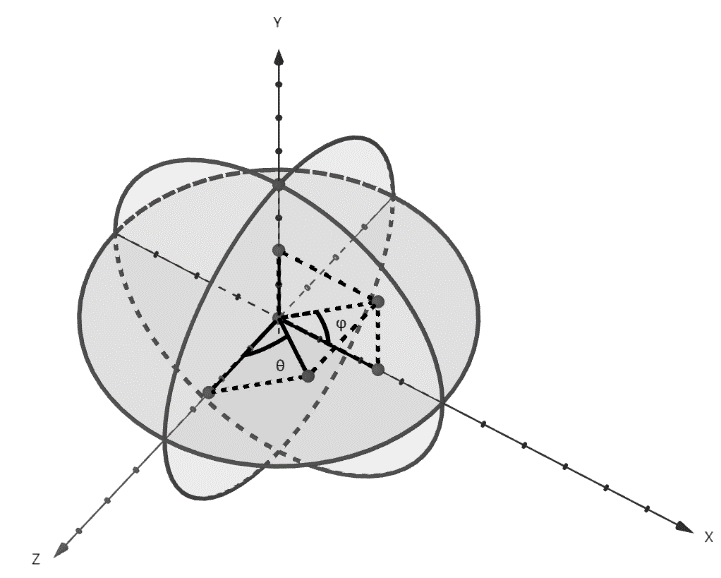
图62 球面坐标系中球面上一点的极角$\theta$与方位角$\theta$
Figure 62 Polar angle $\theta$ and azimuth angle $\varphi$ of a point on the sphere in the spherical coordinate system
上图中有三个两两互相垂直的圆环面,圆环面的边缘三个圆环表示一个球面.该球面表示以球状膨胀宇宙内部任意动点为球心,$\mathrm{d} [R_\mathrm{L}]$半径的一个球面.$\mathrm{d} [R_\mathrm{L}]$表示$R_\mathrm{L}$的无穷小量.以动点为中心,与该动点相距$R_\mathrm{L}$所有天体位于以动点为中心,$R_\mathrm{L}$为半径的球面上.假设可观测宇宙尺寸相对于球状膨胀宇宙尺寸非常小,那么同一时间该动点周围的三维空间宇宙动点速度的梯度近似不变.此时,如果把星系视作一个点,这个点就是上图中的球心,在星系点附近一点相对该星系点的三维空间宇宙动点速度的梯度和100光年外的一点相对于该星系点的三维空间宇宙动点速度的梯度相等.这里假设哈勃常数全部来自多普勒效应,哈勃常数中非多普勒效应的部分暂不考虑.在这样的假设前提下,三维空间宇宙动点速度的梯度对应于天文学的哈勃常数,不同的是哈勃常数定义的是标量,这里三维空间宇宙动点速度的梯度定义的是向量.$\mathrm{d} [R_\mathrm{L}]$趋于0时得出的三维空间宇宙动点速度的梯度向量极限就是星系点的向量化的哈勃常数.
$$\begin{equation*}{H_{0}}\ ( r \rightarrow R_{\mathrm{L}} ) = {H_{0}} \ ( r \rightarrow 0 + \mathrm{d} [R_\mathrm{L}] ) \tag{16 - 28}\end{equation*}$$
在上图的球坐标系中,$\mathrm{d} [r]$、$\mathrm{d} [S_{1}]$、$\mathrm{d} [S_{2}]$分别是$\mathrm{d} [R_\mathrm{L}]$在x、y、z轴方向上的投影
$$\begin{equation*}\mathrm{d}[r] = \mathrm{d}[R_\mathrm{L}] \cos [\theta] \tag{16 - 29}\end{equation*}$$
$$\begin{equation*}\mathrm{d}[S_{1}] = \mathrm{d}[R_\mathrm{L}] \sin [\theta] \cos [\varphi] \tag{16 - 30}\end{equation*}$$
$$\begin{equation*}\mathrm{d}[S_{2}] = \mathrm{d}[R_\mathrm{L}] \sin [\theta] \sin [\varphi] \tag{16 - 31}\end{equation*}$$
三维空间宇宙动点速度的梯度在x、y、z轴方向的分量
$$\begin{equation*}A_\mathrm{x} = \frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[R_\mathrm{L}]} \tag{16 - 32}\end{equation*}$$
$$\begin{equation*}A_\mathrm{y} = \frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[R_\mathrm{L}]} \tag{16 - 33}\end{equation*}$$
$$\begin{equation*}A_\mathrm{z} = \frac{\mathrm{d}[v_\mathrm{z} ]}{\mathrm{d}[R_\mathrm{L}]} \tag{16 - 34}\end{equation*}$$
注意,上面的三个公式的$\mathrm{d}[R_\mathrm{L}]$是三个不同方向上的.
把16 - 29式代入16 - 32式,16 - 30式代入16 - 33式,16 - 31式代入16 - 34式;同时代入16 - 22式
$\begin{flalign}A_\mathrm{x} = \frac{\mathrm{d}[v_\mathrm{x} ]}{\mathrm{d}[r]} \cos [\theta] = A_\mathrm{right} \cos [\theta]\end{flalign}$
$\begin{flalign}A_\mathrm{y} = \frac{\mathrm{d}[v_\mathrm{y} ]}{\mathrm{d}[S_{1}]} \sin [\theta] \cos [\varphi] = A_\mathrm{up} \sin [\theta] \cos [\varphi]\end{flalign}$
$\begin{flalign}A_\mathrm{z} = \frac{\mathrm{d}[v_\mathrm{z} ]}{\mathrm{d}[S_{2}]} \sin [\theta] \sin [\varphi] = A_\mathrm{up} \sin [\theta] \sin [\varphi]\end{flalign}$
整理得
$$\begin{equation*}A_\mathrm{x} = A_\mathrm{right} \cos [\theta] \tag{16 - 35}\end{equation*}$$
$$\begin{equation*}A_\mathrm{y} = A_\mathrm{up} \sin [\theta] \cos [\varphi] \tag{16 - 36}\end{equation*}$$
$$\begin{equation*}A_\mathrm{z} = A_\mathrm{up} \sin [\theta] \sin [\varphi] \tag{16 - 37}\end{equation*}$$
三维空间宇宙动点速度的梯度$A_\mathrm{xyz}$可以用三个坐标表示,$A_\mathrm{xyz} = \left( A_\mathrm{x} , A_\mathrm{y} , A_\mathrm{z} \right)$.三个坐标代入16 - 35、16 - 36、16 - 37式
$$\begin{equation*}A_\mathrm{xyz} = ( A_\mathrm{right} \cos [\theta] , A_\mathrm{up} \sin [\theta] \cos [\varphi] , A_\mathrm{up} \sin [\theta] \sin [\varphi] ) \tag{16 - 38}\end{equation*}$$
绘制$A_\mathrm{xyz}$在不同情况下的图像

图63 $A_\mathrm{up} = A_\mathrm{right}$时$A_\mathrm{xyz}$的图像
Figure 63 Graph of the function of $A_\mathrm{xyz}$ when $A_\mathrm{up} = A_\mathrm{right}$

图64 $A_\mathrm{up} > A_\mathrm{right}$时$A_\mathrm{xyz}$的图像
Figure 64 Graph of the function of $A_\mathrm{xyz}$ when $A_\mathrm{up} > A_\mathrm{right}$

图65 $A_\mathrm{up} < A_\mathrm{right}$时$A_\mathrm{xyz}$的图像
Figure 65 Graph of the function of $A_\mathrm{xyz}$ when $A_\mathrm{up} < A_\mathrm{right}$
三维空间宇宙动点速度的梯度$A_\mathrm{xyz}$是一个向量,这个向量的大小
$$\begin{equation*}\left\| A_\mathrm{xyz} \right\| = \sqrt{A_\mathrm{x}^{2} + A_\mathrm{y}^{2} + A_\mathrm{z}^{2}} \tag{16 - 39}\end{equation*}$$
上式代入16 - 35、16 - 36、16 - 37式
$$\begin{equation*}\left\| A_\mathrm{xyz} \right\| = \sqrt{\left(\cos [\theta]\right)^{2} A_\mathrm{right}^{2} + \left(\sin [\theta]\right)^{2} A_\mathrm{up}^{2}} \tag{16 - 40}\end{equation*}$$
求解三维空间宇宙动点速度的梯度平均大小
$$\begin{equation*}\begin{aligned}\mathrm{Integrate}_\mathrm{V} \left[\left\| A_\mathrm{xyz} \right\|\right] & = \int_{0}^{2 \pi} \left( \int_{0}^{2 \pi} \sqrt{\left(\cos [\theta]\right)^{2} A_\mathrm{right}^{2} + \left(\sin [\theta]\right)^{2} A_\mathrm{up}^{2}} \mathrm{d}[\varphi] \right) \mathrm{d}[\theta] \\ & = 4 \pi ( E \left[1 - \frac{A_\mathrm{up}^{2}}{A_\mathrm{right}^{2}}\right] A_\mathrm{right} + E \left[1 - \frac{A_\mathrm{right}^{2}}{A_\mathrm{up}^{2}}\right] A_\mathrm{up} ) \end{aligned}\tag{16 - 41}\end{equation*}$$
$$\begin{equation*}\mathrm{Integrate}_\mathrm{V} [1] = \int_{0}^{2 \pi} ( \int_{0}^{2 \pi} 1 \mathrm{d}[\theta] ) \mathrm{d}[\varphi] = 4 \pi ^{2} \tag{16 - 42}\end{equation*}$$
$$\begin{equation*}\overline{ \left\| A_\mathrm{xyz} \right\| } = \frac{\mathrm{Integrate}_\mathrm{V} \left[\left\| A_\mathrm{xyz} \right\|\right]}{\mathrm{Integrate}_\mathrm{V} [1]} \tag{16 - 43}\end{equation*}$$
$$\begin{equation*}\overline{ \left\| A_\mathrm{xyz} \right\| } = \frac{E \left[1 - {\displaystyle\frac{A_\mathrm{up}^{2}}{A_\mathrm{right}^{2}}}\right] A_\mathrm{right} + E \left[1 - {\displaystyle\frac{A_\mathrm{right}^{2}}{A_\mathrm{up}^{2}}}\right] A_\mathrm{up}}{\pi} \tag{16 - 44}\end{equation*}$$
结果中包含第二类完全椭圆积分.特别的,当$A_\mathrm{right} = A_\mathrm{up} = A_\mathrm{all}$时,$\overline{ \left\| A_\mathrm{xyz} \right\| } = A_\mathrm{all}$ .
在第9章给出哈勃定律公式
$$\begin{equation*}v = H_{0} D \tag{9 - 5}\end{equation*}$$
上式变换成微分形式
$$\begin{equation*}H_{0} = \frac{\mathrm{d}[v]}{\mathrm{d}[D]} \tag{16 - 45}\end{equation*}$$
比较三维空间宇宙动点速度的梯度和哈勃常数的微分定义,假如哈勃常数全部来自多普勒效应,可得
$$\begin{equation*}\overline{ \left\| A_\mathrm{xyz} \right\| } = H_{0} \tag{16 - 46}\end{equation*}$$
向量化的三维空间宇宙动点速度的梯度是一个椭球体,在不同的情况下分别是扁椭球体、长椭球体和球体.联想到宇宙微波背景辐射图像也是一个球面图,下面尝试发现宇宙微波背景辐射图与球状膨胀宇宙的关联.
普朗克卫星(Planck)的前身NASA的威尔金森微波各向异性探测器(WMAP)所暗示的两个CMB异常特征在新的高精度数据中得到了证实.一个是天空中两个半球的平均温度的不对称性(用弧线表示),黄道南半球的平均温度略高,黄道北半球的平均温度略低.这与标准模型所做的预测相反,即宇宙在我们看的任何方向都应该是大体相似的.还有一个冷点延伸到一片天空上,比预期的要大得多(图中已经圈出).88
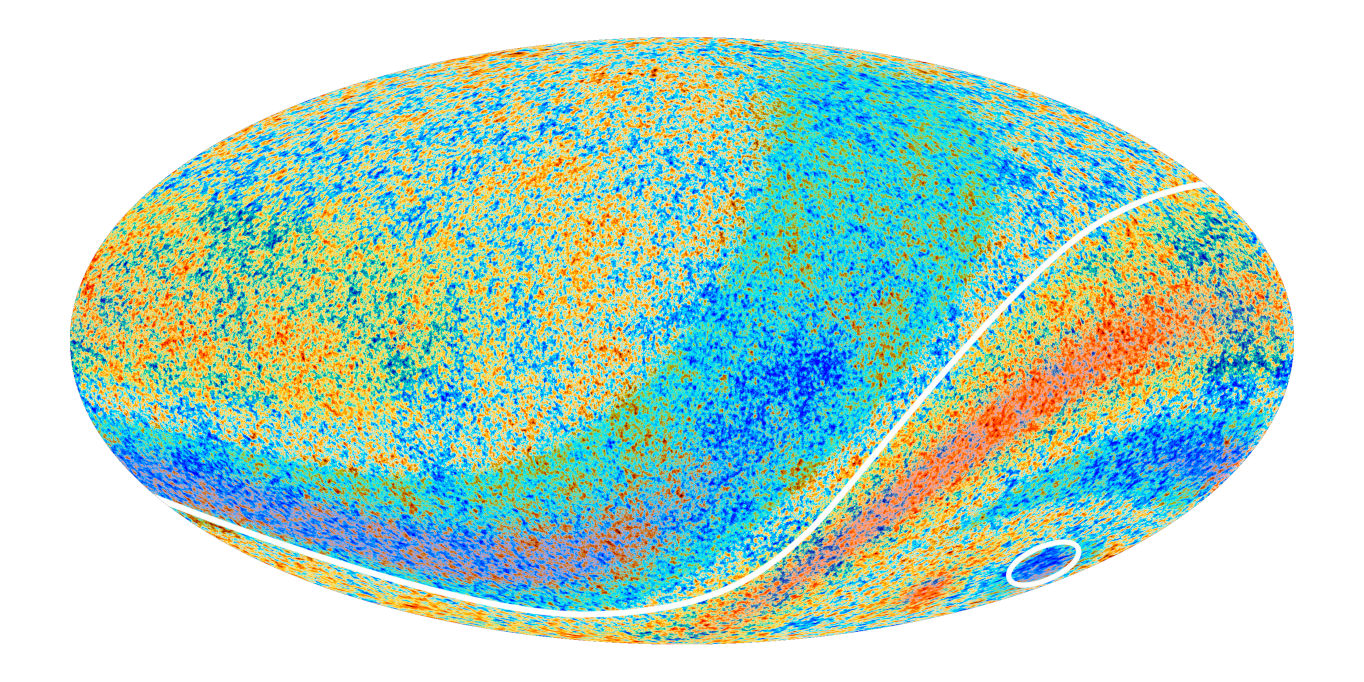
图66 普朗克卫星图像异常增强图 来源:88
Figure 66 Planck enhanced anomalies Source: 88

图67 可观测宇宙的半球不对称特征
Figure 67 The hemispheric asymmetry of the observable universe
微波背景辐射黄道南半球和北半球的差异可以用可观测宇宙在球状膨胀宇宙的半球不对称解释.上图中可观测宇宙沿着细线方向外移动,虚线左侧的以太远离可观测宇宙,虚线右侧的天体靠近可观测宇宙,虚线上的可观测宇宙附近的以太与可观测宇宙相对静止.根据多普勒效应,电磁辐射源远离我们的时候出现红移、频率降低、温度降低,电磁辐射源靠近我们的时候出现蓝移、频率升高、温度上升.如果上述因素是CMB异常特征的真正原因,那么宇宙微波背景辐射图的冷点对应于球状膨胀宇宙的中心,热点对应于可观测宇宙整体移动的终点,冷点到热点的连线是可观测宇宙整体移动方向,这条连线通过球状膨胀宇宙的球心.
天文学上测量太阳系以外天体的长度单位常用秒差距(parsec,pc)和光年(light-year).1秒差距约为3.26光年,光年指光在真空中一年时间内传播的距离.前面提到银河系所在的拉尼亚凯亚超星系团范围达到约5.2亿光年.在广义相对论中,引力波以光速传播.相应的引力的改变不是瞬时超距作用,而是以光速的速度改变的.球状膨胀宇宙的尺寸在增大过程中,球状膨胀宇宙各点对某一动点的产生的重力因为光速的延迟,不是同步改变的.以球状膨胀宇宙边缘一点为观测点,在这个位置看到的球状膨胀宇宙并不是球形,而是变形的球形.因为光传播速度与引力传播速度相同,球状膨胀宇宙这个动态变大的球体中,各个动点产生引力到达球状膨胀宇宙边缘一个固定动点,等价于在这个固定动点观测到的变形的球形瞬时产生的引力.下面求解这个变形的球体形状.
约定球状膨胀宇宙边缘一个固定动点a,在$t_{0}$时刻这个点的位置是A0,在$t_{1}$时刻是A.球状膨胀宇宙边缘另一个任意固定动点b,在$t_{0}$时刻这个点的位置是B.$t_{1} - t_{0} = t$,动点a从A0移动到A花费的时间是$t$,$t_{1}$时刻动点b在B点发出的光刚好到达A点,O是球状膨胀宇宙的中心,在$t_{0}$时刻球状膨胀宇宙的半径是$R_{0}$,在$t_{1}$时刻球状膨胀宇宙的半径是$R_\mathrm{t}$,假设这段时间内,球状膨胀宇宙边缘的膨胀速度不变,大小是$v$.

图68 球状膨胀宇宙边缘上,来自不同位置动点的光线到达固定动点这个过程的几何分析
Figure 68 Geometric analysis of the process of light from moving points at different positions reaching a fixed moving point on the edge of the spherically expanding universe
应用余弦定理得
$$\begin{equation*}AB^{2} = OA^{2} + OB^{2} - 2\ OA\ OB\ \cos [\gamma] \tag{16 - 47}\end{equation*}$$
图形中有几何关系
$$\begin{equation*}AB = ct , OA = R_{0} + vt , OB = R_{0}\tag{16 - 48}\end{equation*}$$
$$\begin{equation*}R_\mathrm{t} = R_{0} + vt \tag{16 - 49}\end{equation*}$$
联合16 - 47、16 - 48、16 - 49式可得$R_{0}$与$R_\mathrm{t}$的关系
$$\begin{equation*}R_{0} = \frac{( c^{2} - v ( v \ \cos [\gamma] + \sqrt{( 1 - \cos [\gamma] ) ( 2 c^{2} - v^{2} - v^{2} \cos [\gamma] )} ) ) R_\mathrm{t}}{( c - v ) ( c + v )} \tag{16 - 50}\end{equation*}$$
以光速为参考标准,改写球状膨胀宇宙边缘的膨胀速度
$$\begin{equation*}v = k_\mathrm{v} c \tag{16 - 51}\end{equation*}$$
把16 - 51代入16 - 50式
$$\begin{equation*}R_{0} = \frac{( 1 - k_\mathrm{v} ( \cos [\gamma] k_\mathrm{v} + \sqrt{( 1 - \cos [\gamma] ) ( 2 - ( 1 + \cos [\gamma] ) k_\mathrm{v}^{2} )} ) ) R_\mathrm{t}}{1 - k_\mathrm{v}^{2}} \tag{16 - 52}\end{equation*}$$
已知$R_\mathrm{t}$对应于球状膨胀宇宙的边缘半径,$R_{0}$对应于A点观测到的球状膨胀宇宙的边缘任意一点的半径.上式可以求得球状膨胀宇宙的实际形状和在A点观测到的变形的形状.同时这个变形的宇宙对A点产生的瞬时超距重力等价于实际球状膨胀宇宙对A点产生的重力.绘制$R_{0}$与$R_\mathrm{t}$的几何关系:

图69 $k_\mathrm{v} = 0.01$时$R_{0}$与$R_\mathrm{t}$的几何关系
Figure 69 The geometric relationship between $R_{0}$ and $R_\mathrm{t}$ when $k_\mathrm{v} = 0.01$

图70 $k_\mathrm{v} = 0.1$时$R_{0}$与$R_\mathrm{t}$的几何关系
Figure 70 The geometric relationship between $R_{0}$ and $R_\mathrm{t}$ when $k_\mathrm{v} = 0.1$

图71 $k_\mathrm{v} = 0.8$时$R_{0}$与$R_\mathrm{t}$的几何关系
Figure 71 The geometric relationship between $R_{0}$ and $R_\mathrm{t}$ when $k_\mathrm{v} = 0.8$
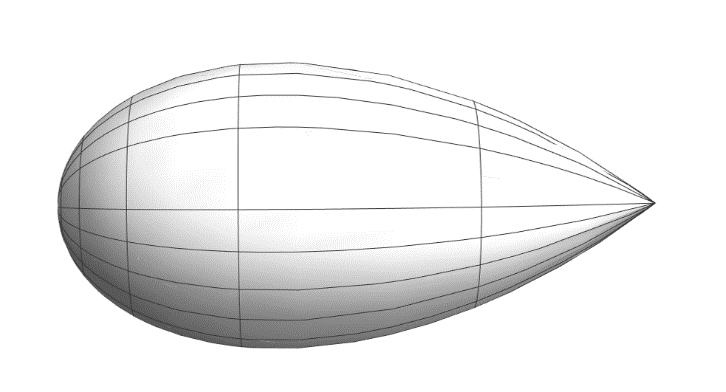
图72 $k_\mathrm{v} = 0.8$时$R_\mathrm{t}$的立体图
Figure 72 Stereoscopic view of $R_\mathrm{t}$ when $k_\mathrm{v} = 0.8$
前面分析球状膨胀宇宙的动力学分析基于重力瞬时超距作用的假设,下面开始考虑因引力传播的光速极限带来的误差.
假设球状膨胀宇宙初始半径是1,选取参数$\left\{ k_\mathrm{c} → 1 , s → 0.5 \right\}$代入15 - 45式并绘图,这个时候球状膨胀宇宙外部半径涨到1.5倍.

图73 $v_\mathrm{r}$的函数图像
Figure 73 Graph of the function of $v_\mathrm{r}$
假设上图的半径与球状膨胀宇宙各点的宇宙膨胀速度与真实情况存在相似的地方,银河系所在的球状膨胀宇宙位置初始半径在0~1区间是等概率分布的,相应的银河系的所在点的宇宙膨胀速度对应于图中每一点在横轴方向尺寸上是等概率分布的.$v_\mathrm{r}$变化范围为0~0.816,上面的图像接近一条直线,可得银河系的所在点的宇宙膨胀速度在0~0.816区间近似等概率分布,这里为了简化运算,视作等概率分布.设$v_\mathrm{r}$的最大值是$v_\mathrm{rmax}$,银河系所在点的宇宙膨胀速度是$v_\mathrm{rGC}$,事件概率函数是$P$.
易得
$P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} > 10\right] = 0.1 , P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} ≤ 10\right] = 0.9$
$P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} > 100\right] = 0.01 , P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} ≤ 100\right] = 0.99$
$P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} > 1000\right] = 0.001 , P \left[\displaystyle\frac{v_\mathrm{rGC}}{v_\mathrm{rmax}} ≤ 1000\right] = 0.999$
排除小概率事件,球状膨胀宇宙边缘一点的宇宙膨胀速度与银河系所在点的宇宙膨胀速度数量级相近.银河系核在宇宙中的速度约为565±5 km/s,这个速度包含银河系所在点的宇宙膨胀速度,后者的数量级小于或等于前者的数量级.进而得到,银河系所在点的宇宙膨胀速度远小于光速,$k_\mathrm{v}={v}/{c}$接近0.此时等效瞬时超距重力对应的变形形状宇宙接近球形,在不考虑细微误差的情况下,前面的球状膨胀宇宙公式都可以适用.